Newton’s robot is programed to position the measuring head in the correct position to perform laser scanning segments of the Baffle Former Assembly. Each laser scan segment is joined together creating a Baffle Former Assembly 3D CAD model with a swelling accuracy of + 0.0004 (0.01 mm) inches. The system also delivers high resolution color human readable images of the baffle plates along with full CAD models of the baffle former bolts and keepers.
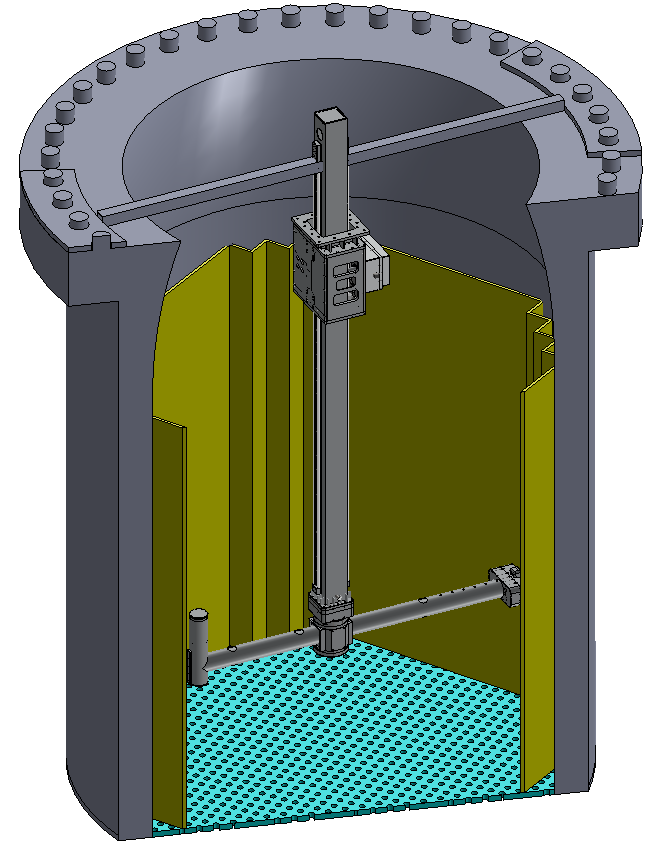
The robotic system consists of center mast, vertical gear box, indexing positioning arm, rotational gear box, counter-weight, laser scanning/camera measuring head and control unit. The robot is secured and centered by a cross piece or frame that attaches on the reactor flange supplied by the customer or can be supplied by Global Nuclear Associates (GNA). (https://www.globalnuclearassociates.com)
In addition, the measuring head cameras are very high resolution and produce human viewable images that can perform EVT-1, VT-1 and VT-3 visual inspection of the lower core barrel to meet MRP227, MRP228 and ASME Section XI requirements.
|